JMM,Java Memory Model,Java 内存模型。
什么是内存模型,要他何用?
假定一个线程为变量var赋值:var = 3;,内存模型要回答的问题是:在什么条件下,读取变量var的线程可以看到3这个值?
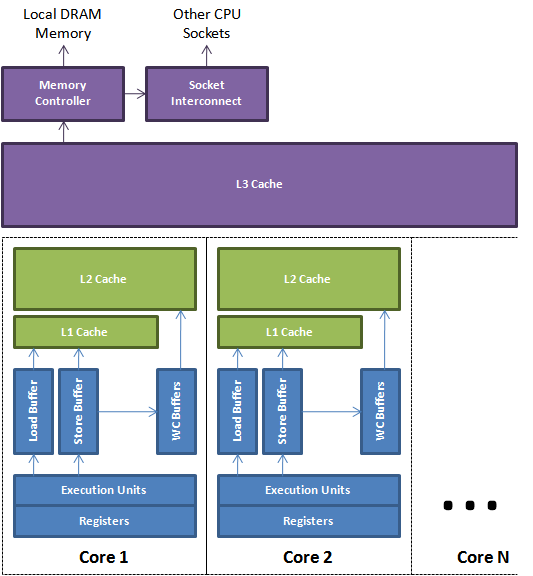
如果缺少了同步,线程可能无法看到其他线程操作的结果。导致这种情况的原因可以有:编译器生成指令的次序可以不同于源代码的“显然”版本,编译器还会把变量存储在寄存器而不是内存中;处理器可以乱序或并行执行指令;缓存会改变写入提交到主存得到变量的次序;存储在处理器本地缓存中的变量对其他处理器不可见 等等。
数据依赖性
如果两个操作访问同一个变量,且这两个操作中有一个为写操作,此时这两个操作之间就存在数据依赖性。数据依赖分下列三种类型:
名称 代码示例 说明 写后读 a = 1;b = a; 写一个变量之后,再读这个位置。 写后写 a = 1;a = 2; 写一个变量之后,再写这个变量。 读后写 a = b;b = 1; 读一个变量之后,再写这个变量。
上面三种情况,只要重排序两个操作的执行顺序,程序的执行结果将会被改变。
编译器和处理器在重排序时,会遵守数据依赖性,编译器和处理器不会改变存在数据依赖关系的两个操作的执行顺序。
as-if-serial语义
as-if-serial语义的意思指:不管怎么重排序,(单线程)程序的执行结果不能被改变。编译器、runtime 和处理器都必须遵守as-if-serial语义。
数据竞争
当程序未正确同步时,就会存在数据竞争。java内存模型规范对数据竞争的定义为:在一个线程中写一个变量,在另一个线程读同一个变量,而且写和读没有通过同步来排序。
顺序一致性模型
操作执行的顺序是唯一的,就是它们出现在程序中的顺序,这与执行它们的处理器无关;变量每一次读操作,都能得到执行序列上这个变量最新的写入值,无论这是哪个处理器写入的。这个是一个理想的模型,JMM是不支持的。
Java 语言规范规定了 JVM 要维护内部线程类似顺序语意(within-thread as-if-serial semantics):只要程序的最终结果等同于它在严格的顺序环境中执行的结果,那么上述所有的行为都是允许的。
JMM 规定了 JVM 的一种最小保证:什么时候写入一个变量会对其他线程可见。
继续阅读